Capon算法,也称为最小方差无失真响应(Minimum Variance Distortionless Response, MVDR)波束形成器。Capon算法的主要目标是通过调整阵列天线的加权系数,使得在期望信号方向上保持无失真响应,同时最小化来自其他方向的干扰和噪声能量。
Capon算法原理
信号模型
在线性调频毫米波雷达的信号处理中,我们常常会先对接收到的信号根据距离维度或者速度维度分离,再测角。傅里叶变化并再频域分离后的信号,是非常标准的窄带信号(FFT本身可以视为窄带滤波器组)。因此在建立信号模型时,我们将信号假设为一个窄带信号。
信号带宽较窄的情况下,信号的频率成分集中,相邻频率分量的相位变化相对缓慢,从而在空间阵列上的时间延迟可以直接通过相位差来体现。再次基础上我们可以用相位差大大简化信号模型。
设现在存在 M 个阵元 p 个信号源,一帧数据供 N 个快拍。
x(n)=As(n)+n(n)
x(n): 表示系统的输入信号, x(n) 是一个 M×1 的列向量,分别表示 M 个阵元接收到的信号。
s(n): 并表示信号源发送过来的信号。一般选择其中1个阵元作为参考阵元,s(n)=s1(n)s2(n)⋮sp(n) , si(n) 表示参考阵元接收到的第 i 信号源的信号。
A: 是一个 M×p 的到达矢量矩阵,每一列都是一个到达矢量(arrival vector),A=[a(ω1),a(ω2),⋯,a(ωp)],用于表示不同阵元接收到的信号的差异,通常 x1(n) 是参考阵元的接受信号, 此时 A 的第一行为 [1,1,⋯,1] 。
n(n): 表示噪声,是M×1 的列向量。
设计权向量 w
quot;">
系统接收到的信号 x(n) 中叠加了多个信号源的信号。我们希望设计一个权向量 w 使得波束形成器的输出能够抽取出想要的信号源的方向,同时使得输出信号的总功率尽量的小。
我们先将这个系统简单描述成一下公式:
y(n)=wHx(n)
假设我们的目标时要从 p 个信号源的信号 s(n) 中把我们想要的信号源 k 的信号 sk(n) 分离出来。
首先将 x(n) 拆分:
x(n)=a(ωk)sk(n)+i=1,i=k∑pa(ωi)si(n)+n(n)
式子中的三项分别表示:期望得到的信号、其他干扰信号、噪声。将 (3) 代入 (2) 得:
y(n)y(n)=wH[a(ωk)sk(n)+i=1,i=k∑pa(ωi)si(n)+n(n)]=wHa(ωk)sk(n)+i=1,i=k∑pwHa(ωi)si(n)+wHn(n)
假如我们希望保留期望信号 sk(n) 同时减少其他干扰信号 si(n),i=k 的功率,则权向量需要满足一下公式:
wHa(ωk)wHa(ωi)=1=0,ωi=ωk(波束形成条件)(零点形成条件)
由于信号源方向 ωi 是未知的,仅仅依靠以上两个条件难以推导权向量 w。因此我们使用另一个思路:在满足式 (6):wHa(ωk)=1 的前提下,令系统输出 y(n) 的功率尽量的小。
y(n) 的功率可以表示为:
E{∣y(n)∣2}=N→∞limn=1∑N∣y(n)∣2=wHRxxw
我们现在求解的问题是: 在约束条件 (6) 的情况下,求得令 E{∣y(n)∣2} 最小的权向量 w ,用公式表达如下:
约束条件 wHa(ωk)=1 代表无失真,期望令 E{∣y(n)∣2} 最小对应最小方差,合起来就是‘最小方差无失真’,所以常常将Capon算法称为‘最小方差无失真响应波束形成器(MVDR beamformer)’
wminE{∣y(n)∣2}=wHRxxwsubject towHa(ωk)=1
使用拉格朗日乘数法(Lagrange multiplier)求解这一优化问题。首先构造目标函数:
J(w)=wHRxxw+λ[1−wHa(ωk)]
其中 λ 为拉格朗日乘数。令 J(w) 的导数为0:
∂w∂J(w)=0Rxxw−λa(ωk)=0
进一步计算如下:
λa(ωk)λRxx−1a(ωk)λa(ωk)HRxx−1a(ωk)λ=Rxxw=w=a(ωk)Hw=1=a(ωk)HRxx−1a(ωk)1
将 λ 重新代回去计算 wopt :
wopt=a(ωk)HRxx−1a(ωk)Rxx−1a(ωk)
将 wopt 带入式 (8) 可以得到 Capon空间谱:
PCapon(ω)=a(ω)HRxx−1a(ω)1
遍历所有 ω 值, 得到 Capon空间谱并找到 p 个峰值,每一个峰值对应的ω 值即为波束方向。
matlab程序仿真
matlab提供了两个Cpaon算法的函数phased.MVDREstimator 和 phased.MVDREstimator2D,分别是一维和二维的测角。
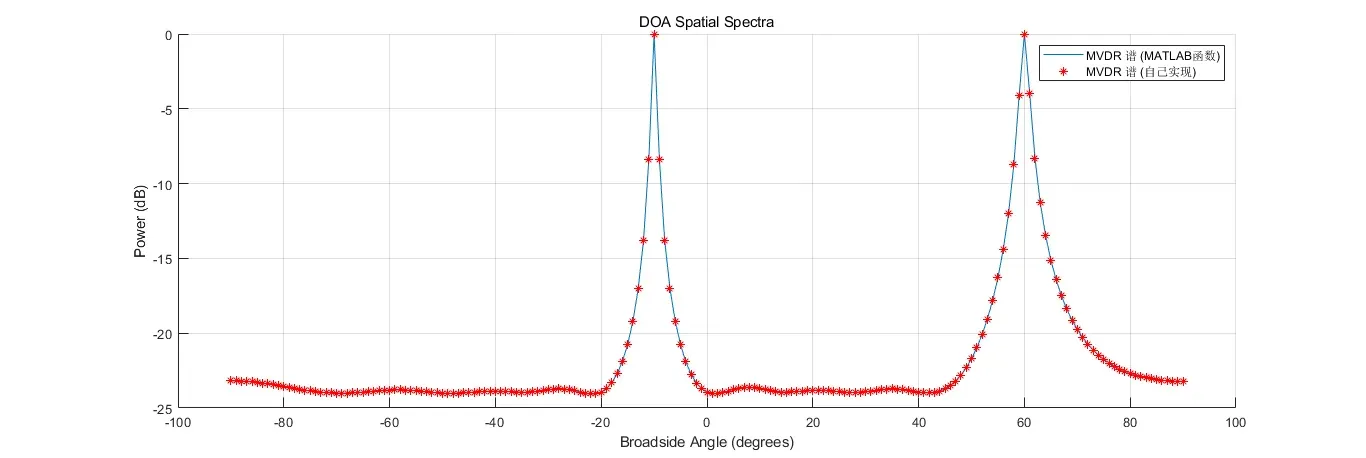
这边在matlab例子的基础上自己实现一遍Capon算法,对比一下结果是否一致
matlab的例子可以用下面的指令打开
matlabopenExample('phased/EstimateDOATwoSignalsUsingMVDRExample')
完整代码
matlabclear; clc; close all
%% 初始化参数,生成阵列信号
fs = 8000;
t = (0:1 / fs:1).';
x1 = cos(2 * pi * t * 300);
x2 = cos(2 * pi * t * 400);
% 生成均匀线阵
array = phased.ULA('NumElements', 10, 'ElementSpacing', 1);
array.Element.FrequencyRange = [100e6 300e6];
fc = 150.0e6;
x = collectPlaneWave(array, [x1 x2], [-10 0; 60 0]', fc);
noise = 0.1 * (randn(size(x)) + 1i * randn(size(x)));
signal = x + noise;
axis_angle = (-90:1:90);
%% Capon谱 phased.MVDREstimator
estimator = phased.MVDREstimator('SensorArray', array, 'ScanAngles', axis_angle, ...
'OperatingFrequency', fc, 'DOAOutputPort', true, 'NumSignals', 2);
[y, doas] = estimator(signal);
doas = broadside2az(sort(doas), [20 -5])
%% Capon谱
addpath '.\function'
% 获取阵元坐标
ula_pos = getElementPosition(array);
% 计算到达矢量
steering_vectors = steering_vector(ula_pos, [axis_angle; zeros(size(axis_angle))], physconst('LightSpeed') / fc);
% 去直流 转置
x = transpose(signal - mean(signal, 1));
% 自协方差矩阵
Cxx = x * x';
my_mvdr_spec = 1 ./ sum(steering_vectors' / Cxx .* steering_vectors.', 2);
my_mvdr_spec = abs(my_mvdr_spec);
my_mvdr_spec = sqrt(my_mvdr_spec);
figure("Name", "Capon 算法测角")
hold on;
helperPlotSpec(axis_angle, y, 'MVDR 谱 (MATLAB函数)');
helperPlotSpec(axis_angle, my_mvdr_spec, 'MVDR 谱 (自己实现)', 'r*');
hold off;
详解
第一步是计算遍历角度是用到的导向矢量,sv = steering_vector(pos, ang, lambda) 函数输入阵元位置、角度、信号波长,输出导向矢量,详细解释可以看 到达矢量 (Arrival vector),源文件见steering_vector.m
matlab% 获取阵元坐标
ula_pos = getElementPosition(array);
% 计算到达矢量
steering_vectors = steering_vector(ula_pos, [axis_angle; zeros(size(axis_angle))], physconst('LightSpeed') / fc);
然后计算协方差矩阵,matlab的例程得到的信号x是一个行向量矩阵,所以先转置,在计算协方差矩阵
matlab% 去直流 转置
x = transpose(signal - mean(signal, 1));
% 自协方差矩阵
Cxx = x * x';
得到协方差矩阵和导向矢量后,就可以按照 PCapon(ω)=a(ω)HRxx−1a(ω)1 计算空间谱了。
这里的steering_vectors中包含了多个导向矢量,可以用循环一个一个计算,也可以按照下面的方法算。最后还开根号了,这一步在实际应用中是没有必要的,只是为了和matlab的phased.MVDREstimator得到的结果一致。
matlabmy_mvdr_spec = 1 ./ sum(steering_vectors' / Cxx .* steering_vectors.', 2);
my_mvdr_spec = abs(my_mvdr_spec);
my_mvdr_spec = sqrt(my_mvdr_spec);
结果